260114 - Update for 2026 (inc. comp 2025)
FSAE Competition 25
As the first competition that with a functional electric car, there were many good experiences as well as challenges. For many of the first years on the team it was a good experience and learning opportunity. In addition it was good to meet the FSAE community.
Key takeaways :
Be more prepared. Many of the issues that we encounter could have been avoided or it could have saved lots of time in the pits.
Improvements for next year:
- Pre-comp checklist of items.
- Pre-comp rule scrut
MD26
Goals for 2026 (Technical):
- Clear tech debt from past years (lack of documentation
Gals for 2026: non tech
- Training up skilling and retention
Coming from MD25, there are many things that will be improved. The main issues identified are associated with reliability of the system as well as rules compliance.
There are a few items that will be the main focus for MD26. The priority is the accumulator redesign. Although we passed scrutineering, many of the aspects of the accumulator are not ideal. For example getting each segment in and out wasn't user friendly as well as the many modification made to the accumulator at competition. There are plan on changing the configuration of the Enepaq modules. Currently the configuration of a segment is 22s 4p. However this configuration creates very blocky segments. This creates challenges with mechanical integration. These could be mitigated but it increases the complexity of the design, making it difficult. The main limitation the design is the Orion BMS, only allowing up to 4
The main issues with reliability was due to MD25 being the first EV, these issues will always appear and can be mitigated with more time.
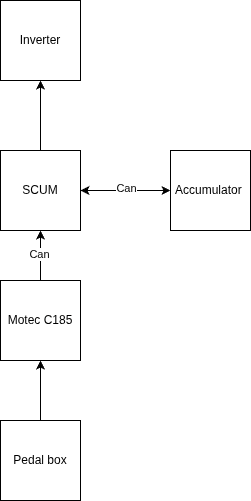
One of the main things to improve next year from the low voltage side is using the Motec C185 dashboard. The dashboard is very powerful with many features. The plan is to use it as a main node in the vehicle architecture, receiving inputs such as APPS and doing prepossessing as well as logging all the sensor data. The C185 is significantly more powerful that most dashboard that other teams use and could handle most very basic ECU functions (At least in the MD25). Then any other data will be communicated over CAN to the SCUM.
In addition to this, the SCUM needs to be updated, the Amphenol connectors are only rated to 250V, meaning the TSAL circuit will need to be moved to a independant board with rated connectors. This means there will need to be a minor SCUM redesign.
Currently I am also in talks with SBG system to get a INS (Inertia navigation system). This would be used for vehicle dynamics analysis but most importantly for traction control.